



Hallo Zusammen,
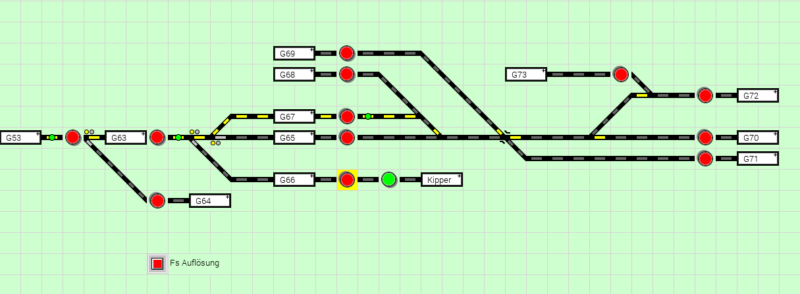
angeregt durch verschiedene Berichte werde ich ein Rocrail basiertes Stellpult für die Fabrik bauen, dass die Bedienung der Fabrik (Weichen und Waggonkipper) am Schirm oder Wahlweise via Hardware Stellpult realisiert. Vorbilder dafür sind die Fremo Bahnhöfe “Borgstede” und “Merkwürden”.
Borgstede: http://wiki.rocrail.net/doku.php?id=userpages:skippa:borgstede-de&s[]=stellpult
Auf Grund des Termins vom Fremotreffen in Mammendorf 2016 (28.10.-02.11.2016) habe ich zunächst mal das Stellpullt auf dem Schirm realisiert, damit ich in Mammendorf auch wirklich sicher Schalten kann.
Die Hardware zum Schalten der Servos und für Rocrail stammt von Peter Gilgen und dem Rocrail Team bzw. ist ein Raspberry Pi 3 Mini Computer. http://wiki.rocrail.net/doku.php?id=hardware-en#raspberry_pi
Der Zusammenbau der Hardware ist simpel und ich habe daher keine Fotos gemacht. Jeder der lesen kann (ENG) und einen Lötkolben bedienen kann, sollte das hinbekommen… . Danach habe ich in Rocrail den Bahnhof definiert. Das ging recht schnell von statten, die Details wie Fahrstrassen und so weiter hatten es dann aber in sich. Ich konnte mit hilfe des Forums jedoch alle Hürden überwinden.
Folgende Seiten in der Doku und im Forum habe ich gebraucht:
Rocrail Fahrstrasse (Start Page): http://wiki.rocrail.net/doku.php?id=route-de
Rocrail SVG Symbole: http://wiki.rocrail.net/doku.php?id=symbols-de
Forum Einträge bzgl Rocnodes: http://forum.rocrail.net/viewtopic.php?f=120&t=12191&p=123275#p123275 und http://forum.rocrail.net/viewtopic.php?f=94&t=10692
Seit gestern Abend ist die Fabrik im Rohbau fertig. Das heisst:
- Alle Weichen und Servos angeschlossen und verkabelt
- Alle Selbstbauweichen (Weller, Code 75) sind eingestellt, getestet und mit allem, was ich habe befahren worden (schnell, langsam, vorwärts, zurück, geschoben, gezogen)
- Alle Weichen sind in Rocrail zugeordnet worden und eingemessen worden (Endlagen)
- DCC Leitung und Versorgung aller Schienen liegt
- Alle Modulübergänge und Stösse getestet
- Passbuchsen verbaut
Damit sieht es wie folgt aus:



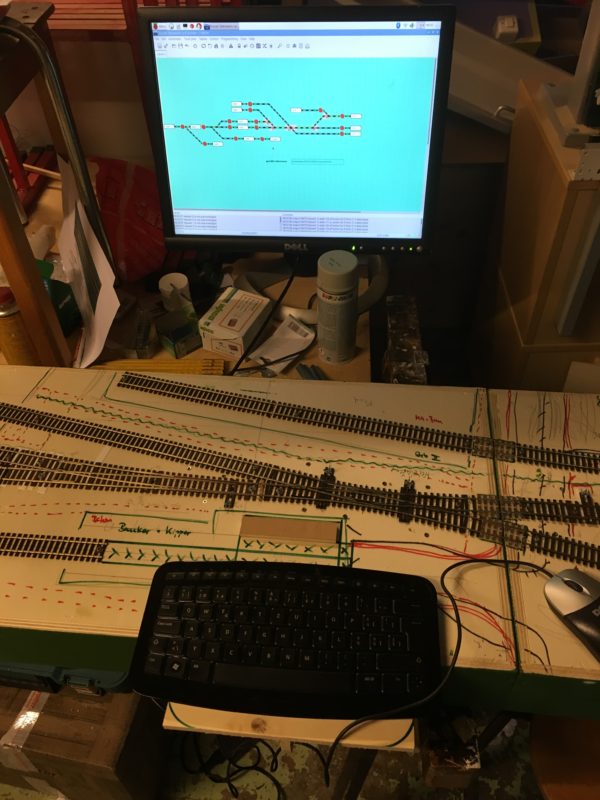
Die Mobile Minitastatur, Maus und ein HDMI/DVI fähiger Monitor sind der Zugang zum Raspberry Pi, der unter dem mittlere Modul wohnt.
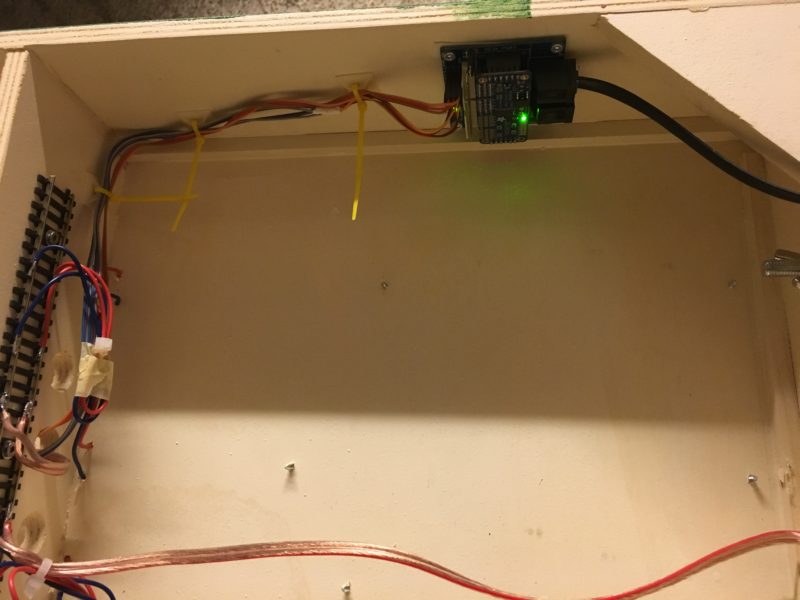
Die Unterwelt präsentiert sich im Moment so:
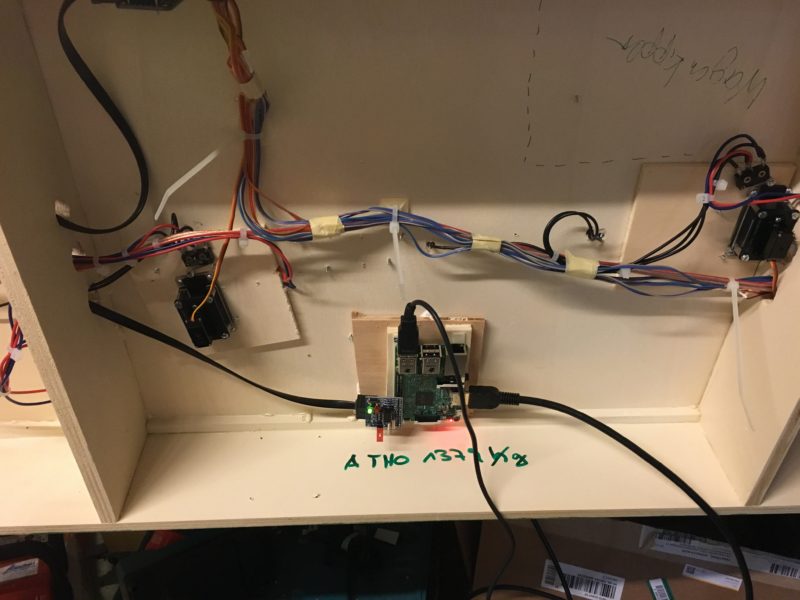
Das “Hirn” – Der Raspberry Pi under der Platte gegenüber des Wagenkippers. Das HDMI Kabel bekommt noch eine Öse am Spant, damit es nicht ziehen kann und festgebunden werden kann. Wie man am Klebeband sieht, sind mir die Kabelbinder ausgegangen.
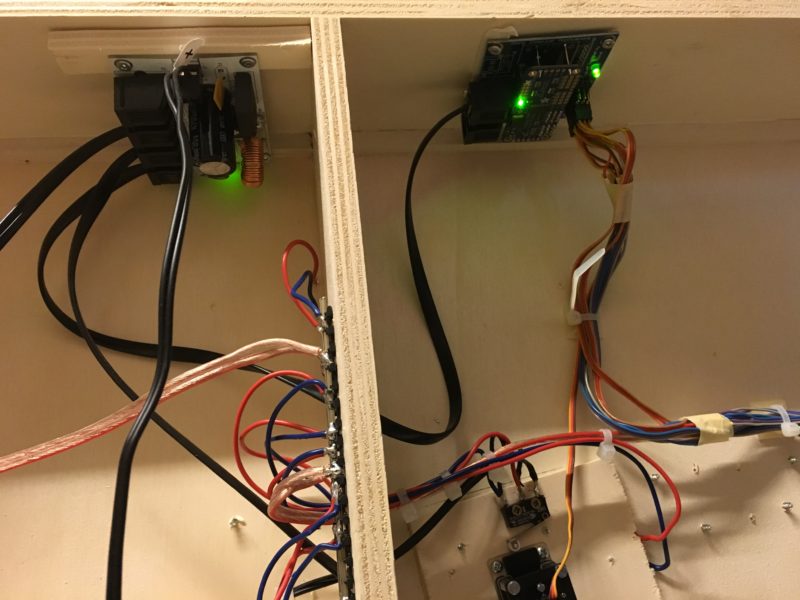
Links die Stromversorgung, die gleichzeitig auch die Verstärkung des I2C Busses übernimmt. Praktisch. Damit habe ich das “Kraftwerk” für die Servos und den Raspi gleich mit dabei! Rechts der 8 (16fach) Servo Decoder für Rocrail, der mit dem I2C PWM-Baustein von Adafruit die Servos treibt.
Um die Verkabelung einfach zu halten, habe ich 2 Servo Decoder verbaut, und noch jede Menge “Platz” für Servos verschwendet. Mir war es aber wichtiger, dass ich einfach auf- und abbauen kann. Was nun noch fehlt, sind die Beschriftungen was wie zusammengehört und was wo reingehört und was sicher nicht wo reingehört. I2C und Loconet haben leider die gleichen Kabel und da muss ich mit Beschriftung für Sicherheit sorgen.
Soweit mal von meiner Seite! Weitere Details folgen dann, wenn ich alle Vorbereitungen für Mammendorf geschafft habe.
LG,
Axel